


Author: eilemann@gmail.com
- Implemented in 0.3
- 0.4: Added thread synchronization to reflect changes from per-node thread synchronization
- 0.6-rc1: Added easier threading model selection
Threads
Application (app/node) Main Thread
The app thread is the main execution thread of an Equalizer application, typically the one running main(). It drives the application's rendering and executes node tasks and nonthreaded rendering tasks.
Render Client (node) Main Thread
The render client main thread is very similar to the application thread, in that it executes node tasks and nonthreaded rendering tasks. The only difference is that it does not drive the application's, and that the main loop is controlled by the Equalizer client library.
Receiver (recv) Thread
Each Equalizer network node has a receiver thread, created during Node::initLocal(). It listens on all connections and reads the data into packets. The packets are dispatched to the command handler functions. The command handler functions in the receiver thread should never block to avoid deadlocks.
Command (cmd) Thread
Each Equalizer network node has a command thread, created during
Node::initLocal(). It executes internal Equalizer commands, for example to
execute co::Object mapping requests by a slave node.
Node Transmit Thread
Each eq::LocalNode has a transmit thread, created during
intialization. It executes the compression and network transmission of output
frames to the nodes using them as input frames.
Pipe Thread(s)
All commands for a pipe and its siblings (windows, channels) are executed in a separate thread for optimal performance. The commands are dispatched from the receiver thread to the node thread using a fifo. Therefore, the pipe thread may block its execution. An exception are nonthreaded pipes, which are executed from the main thread.
Thread Synchronization
Threading Models
Equalizer provides simplified threading models to configure common thread
synchronization strategies. The threading model is a node attribute
(thread_model) and can have the following values:
async: No synchronization between render threads. Only the finishing of framen-latencyis synchronized. Most Equalizer examples use this threading model.draw_sync: In addition to async, all local render threads are synchronized, so that the draw operations happen synchronously with the node main loop. This is the default threading model.local_sync: In addition to draw_sync, all local frame operations, including readback, assemble and swap buffer are synchronized with the node main loop.sync: The execution across all nodes is synchronous. Not yet implemented.
The threading model can be configured using the file format, or programmatically. Applications typically hard-code their threading model. The file format is commonly used to change the threading model for benchmarking and experimentation.
Implementation
The default thread synchronization synchronizes
all Channel::frameDraw operations on a single node with the
node's main thread. This facilitates porting, since the scene database does
not have to be multi-buffered. Advanced applications can remove per-node frame
synchronization.
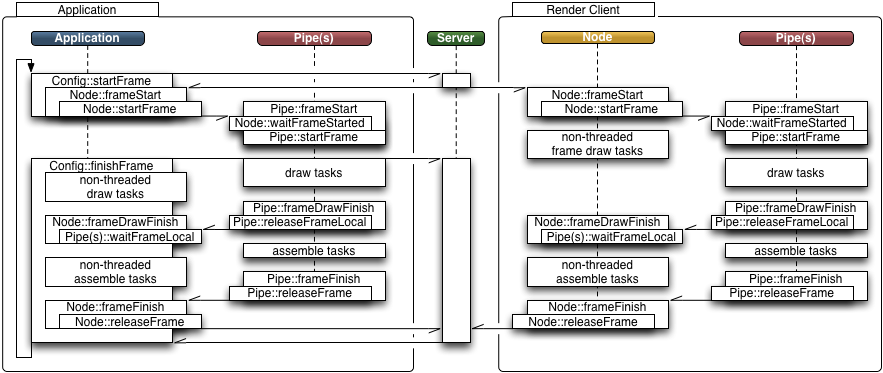
The per-node frame synchronization is achieved through
the startFrame, waitFrameStarted
and releaseFrameLocal, waitFrameLocal synchronization
points. Note that this synchronization is only per-node, different nodes in
the cluster still run asynchronously.
The first one ensures that the application (node) thread is done modifiying
the data. The pipe threads call Node::waitFrameStarted which
blocks until the node calls startFrame
in Node::frameStart.
The second pair ensures that after Config::finishFrame all pipe
threads are done rendering the current frame. The
node's frameDrawFinish waits for all local pipes to release the
synchronization by calling Pipe::releaseFrameLocal, which happens
by default
in Pipe::frameDrawFinish. The frameDrawFinish
methods are called after all Channel::frameDraw of the
corresponding thread have been executed.
Applications which multi-buffer all dynamic data can completely remove frame synchronization by:
- releasing the local synchronization in
Node::frameStart - not calling
Node::waitFrameStartedinPipe::frameStart - not waiting for the pipe synchronization
in
Node::frameDrawFinish